
Ja, wenn man natürlich im Gruppenchat fragt, ob noch jemand was ausgewertet haben möchte, ist man selbst schuld. Mein folgendes Angebot wurde gleich angenommen.
Zum Glück sind die beiden I-Werte (Resultierende vom ZMC und der direkte Wert vom BMS) zu 0.98 korreliert, da könnte ich jetzt sogar die Verlustleistung der Steuerelektronik draus berechnen.
Jänu. What goes around comes around, *seufz*.
Die erste Annahme dazu: die Verlustleistung bzw. die benötigte Leistung der Regelelektronik ist in allen Fahrzuständen (auch ohne Oberdeck :D) konstant. Wenn wir gar keine Verluste hätten, wäre P_pv + P_mot = P_bat. Es gibt aber eine Differenz zwischen P_pv+P_mot und P_bat und genau die sollte in der Annahme der Verlustleistung entsprechen.
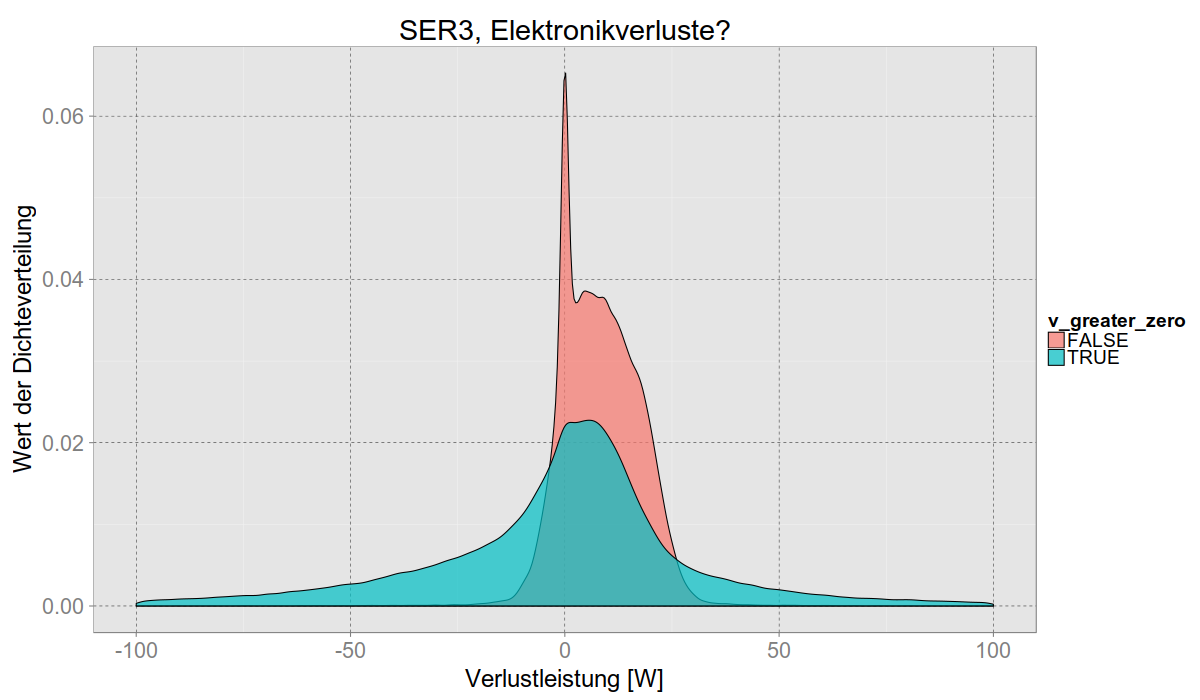
Schauen wir uns also dazu mal die Dichteverteilung an. Die sagt recht klar aus, dass die Verlustleistung der Elektronik nicht konstant ist. Noch dazu sieht sie (aus meiner Perspektive) spannend aus — Hügel und Berge sind nicht nur in natura cool 🙂

Die zweite Annahme: die Verlustleistung ist abhängig davon, ob das Auto steht oder fährt. Okay, also teilen wir die Daten mal soweit auf und machen die Dichteverteilung nochmal:
Jedenfalls sollte ich mir das mal anders anschauen, und zwar in den Dimensionen (Motorleistung x PV-Leistung). Ich gehe davon aus, dass ich von allfälligen Regelverlusten der PV (wenn mehr Leistung über die Panels kommt, gibt’s eigentlich auch mehr Verluste) nichts bemerke, weil der Strom von den Panels erst nach den MPPTs gemessen wird und die Verluste vorher entstehen. Das sollte man dann in einer Dimension sehen (oder eben grad nicht). In der anderen Dimension Motorleistung würde ich aber schon davon ausgehen, dass bei höherer Leistung auch höhere Verluste anfallen.
Also los, 524’000 Datenpunkte mal schnell gruppieren, aggregieren und in eine Heatmap verklappen:


In beiden Heatmaps sieht man eigentlich dasselbe, es ist nur einmal der Mittelwert und dann der Medianwert. Links der roten Linie sind alle Fahrzustände, in denen der Motor rekuperiert hat (dementsprechend viele Lücken, in Australien kommt da fast nichts). Rechts der Linie sind die Zustände, in denen der Motor Energie verblasen hat. Pro Datenpunkt von den 524’000 hab ich die Differenz berechnet, die der Elektronik-Verlustleistung entsprechen sollte, negative Werte weggeworfen und den Rest entsprechend in einen Wert pro Kästchen zusammengefasst.
Man sollte mit steigender Motorleistung erkennen, dass sich die Farbe der Kästchen von dunkelgrün (Mitte) zu gelb/rot (rechts) verändert, und zwar ziemlich unabhängig von der PV-Leistung.
Grob in Zahlen (Motorleistung/Verlustleistung):
- 0-250W / < 10W
- 250-500W / 10-20W
- 500-750W / 20-25W
- 750-1000W / 25-30W
- >1000-1500W / 30-40W
*
Das sind so als Anhaltspunkte ganz plausible Zahlen, wie ich finde. Auch hier: in Südafrika gab es wegen der massiven Steigungen ganz andere Daten als es in Australien geben dürfte. Wenn ich noch einen Neigungssensor hätte, könnte ich noch besser filtern. Meist fährt man auf flacher Strecke mit einer Leistung von 500-1000W, da sind es um die 3% Verluste. Und wie geschrieben: ich nehme an, dass die Verluste die Differenz zwischen gemessener Batterieleistung und der Summe aus P_mot und P_pv sind.
Was ich auch noch nebenbei festgestellt habe: die Spannungswerte vom BMS sind nur auf etwa 1V genau aufgelöst, die vom ZMC auf 0.01V. Die vom ZMC haben vielleicht auf der Strecke und im Display vom SER3 nicht gestimmt, aber in den Offline-Daten auf der SD-Karte sind sie vollständig, also nehm ich sie.
Dauer der Analyse: 2.5h und das war voll spannend 😀
* als Ergänzung eine Viertelstunde nach dem Posten: ja hallo, aus den Verbrauchswerten kann man ja sogar ganz schnell einen Grundstromverbrauch von 5W für die Elektronik und dann etwa 2% Verluste vom Motorcontroller ersehen, eine ganz normale lineare Interpolation. Jetzt kann mal bitte jemand messen gehn und mir das bestätigen.
Und für die Strategie bedeutet das: man sollte immer möglichst schnell fahren, damit die 5W Grundstromverbrauch prozentual nicht so ins Gewicht fallen und ausserdem ist man ja bei fixer Strecke auch schneller da und spart so auch wieder Energie! Wahnsinn, wir hatten Fahrer, die haben das intuitiv verstanden! 😛